Diagram
| Super-types: | gml:AbstractGMLType < ImplicitGeometryType (by extension) |
|---|---|
| Sub-types: | None |
| Name | ImplicitGeometryType |
|---|---|
| Used by (from the same schema document) | Element ImplicitGeometry |
| Abstract | no |
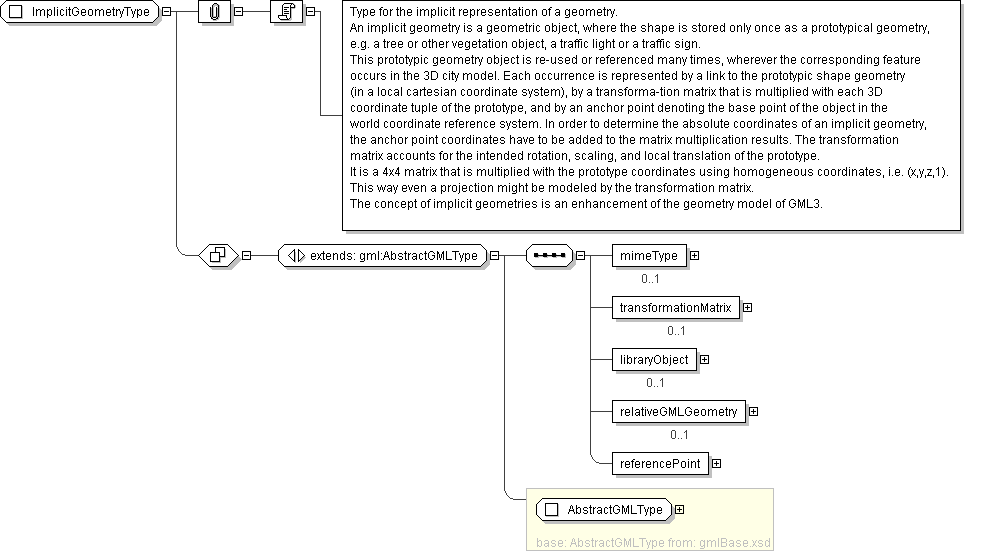
| Documentation | Type for the implicit representation of a geometry. An implicit geometry is a geometric object, where the shape is stored only once as a prototypical geometry, e.g. a tree or other vegetation object, a traffic light or a traffic sign. This prototypic geometry object is re-used or referenced many times, wherever the corresponding feature occurs in the 3D city model. Each occurrence is represented by a link to the prototypic shape geometry (in a local cartesian coordinate system), by a transforma-tion matrix that is multiplied with each 3D coordinate tuple of the prototype, and by an anchor point denoting the base point of the object in the world coordinate reference system. In order to determine the absolute coordinates of an implicit geometry, the anchor point coordinates have to be added to the matrix multiplication results. The transformation matrix accounts for the intended rotation, scaling, and local translation of the prototype. It is a 4x4 matrix that is multiplied with the prototype coordinates using homogeneous coordinates, i.e. (x,y,z,1). This way even a projection might be modeled by the transformation matrix. The concept of implicit geometries is an enhancement of the geometry model of GML3. |
'Multiple names may be provided. These will often be distinguished by being assigned by different authorities, as indicated by the value of the codeSpace attribute. In an instance document there will usually only be one name per authority.'